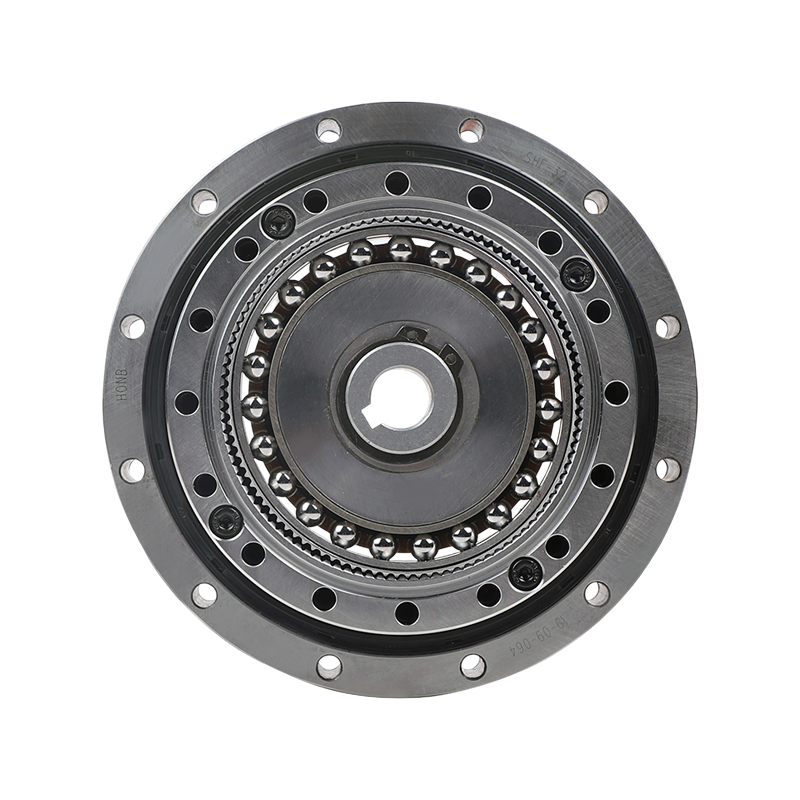



产品类型:机器人减速器
产品型号:14-32
减速比:50-120
回程间隙:≤2.0 弧分 ( 减速比 50)
≤1.0 弧分 ( 减速比 80-120)
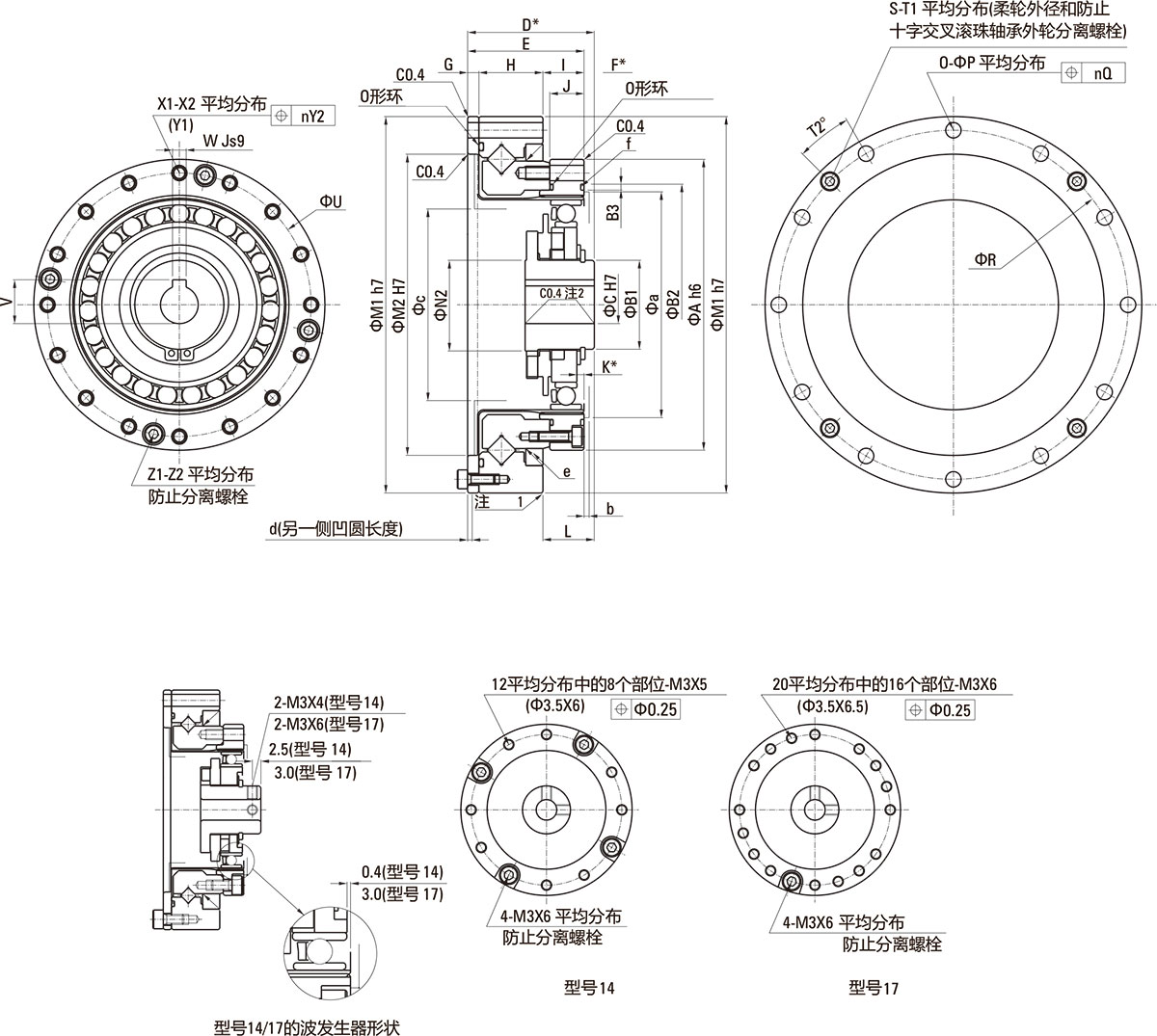
尺寸表
|
型号 符号 |
14 |
17 |
20 |
25 |
32 |
|
|
ΦA h6 |
50 |
60 |
70 |
85 |
110 |
|
|
ΦB1 |
14 |
18 |
21 |
26 |
26 |
|
|
ΦCH7 |
标准 |
6 |
8 |
9 |
11 |
14 |
|
最大 |
8 |
10 |
13 |
15 |
15 |
|
|
D* |
SHF |
28.5+0-0.8 |
32.5+0-0.9 |
33.5+0-1.0 |
37+0-1.1 |
44+0-1.1 |
|
SHG |
28.5+0-0.8 |
32.5+0-0.9 |
33.5+0-1.0 |
37+0-1.1 |
44+0-1.1 |
|
|
E |
23.5 |
26.5 |
29 |
34 |
42 |
|
|
F* |
5 |
6 |
4.5 |
3 |
2 |
|
|
G |
2.4 |
3 |
3 |
3.3 |
3.6 |
|
|
H |
14.1 |
16 |
17.5 |
18.7 |
23.4 |
|
|
I |
7 |
7.5 |
8.5 |
12 |
15 |
|
|
J |
6 |
6.5 |
7.5 |
10 |
14 |
|
|
K* |
SHF |
0.4 |
0.3 |
0.1 |
2.1 |
2.5 |
|
SHG |
1.4 |
1.6 |
1.5 |
3.5 |
4.2 |
|
|
L |
SHF |
17.6+0-0.1 |
19.5+0-0.1 |
20.1+0-0.1 |
20.2+0-0.1 |
22+0-0.1 |
|
SHG |
18.5+0-0.1 |
20.7+0-0.1 |
21.5+0-0.1 |
21.6+0-0.1 |
23.6+0-0.1 |
|
|
ΦM1 |
70 |
80 |
90 |
110 |
142 |
|
|
ΦM2 |
48 |
60 |
70 |
88 |
114 |
|
|
0 |
8 |
12 |
12 |
12 |
12 |
|
|
ΦP |
3.5 |
3.5 |
3.5 |
4.5 |
5.5 |
|
|
ΦQ |
0.25 |
0.25 |
0.25 |
0.25 |
0.25 |
|
|
ΦR |
64 |
74 |
84 |
102 |
132 |
|
|
S |
2 |
4 |
4 |
4 |
4 |
|
|
T1 |
M3X6 |
M3X6 |
M3X8 |
M3X8 |
M4X8 |
|
|
T2 (角度) |
22.5° |
15° |
15° |
15° |
15° |
|
|
ΦU |
44 |
54 |
62 |
77 |
100 |
|
|
V |
- |
10.4 |
12.8 |
16.3 |
||
|
W Js9 |
- |
- |
3 |
4 |
5 |
|
|
X1 |
12E.A.8 |
20 E.A.16 |
16 |
16 |
16 |
|
|
X2 |
M3X5 |
M3X6 |
M3X6 |
M4X7 |
M5X8 |
|
|
Y1 |
Φ3.5X6 |
Φ3.5X6.5 |
Φ3.5X7.5 |
Φ4.5X10 |
Φ5.5X14 |
|
|
Y2 |
0.25 |
0.25 |
0.25 |
0.25 |
0.25 |
|
|
Z1 |
4 |
4 |
4 |
4 |
4 |
|
|
Z2 |
M3X6 |
M3X6 |
M3X8 |
M3X10 |
M4X16 |
|
|
壳体内壁 |
Φa |
38 |
45 |
53 |
66 |
86 |
|
b |
1 |
1 |
1.5 |
1.5 |
1.5 |
|
|
Φc |
31 |
38 |
45 |
56 |
73 |
|
|
d |
1.7 |
2.1 |
2 |
2 |
2 |
|
|
e |
D49585 |
D59685 |
D69785 |
D84945 |
D1101226 |
|
|
重量(kg) |
0.41 |
0.57 |
0.81 |
1.31 |
2.94 |
|
|
· 带*标记的规格:D/F/K表示波发生器、柔轮、圆花键三个部分在轴向上的安装位置和余量。 |
||||||
|
· 请注意,在圆形花键中没有O型圈槽(符号f)。请在设计和安装过程中提供替代密封装置。 |
||||||
|
· 由于柔性花键在操作过程中变形,有必要提供最小的壳体间隙,尺寸为Φa、b、c。 |
||||||
|
· 产品交付时,波浪发生器单独包装。 |
||||||
|
· 可以修改以下尺寸以满足客户的特定要求。 波形发生器:C 柔轮:0和P 圆样条线:X和X₂. |
||||||